
Syncbotic Syncbot 是一个用在研究和教育领域的四轮自主移动机器人 (AMR) 平台, 是由AAEON(研扬科技)开发的。它可以配备 NVIDIA Xavier NX 或基于英特尔 Apollo Lake/Tiger Lake 的控制器,运行 Ubuntu 20.04 操作系统和 ROS 2 框架。另外,Syncbotic Syncbot 还配置了一个带有 EtherCat 主控运行 Zephyr OS 系统的运动控制 MCU 板。
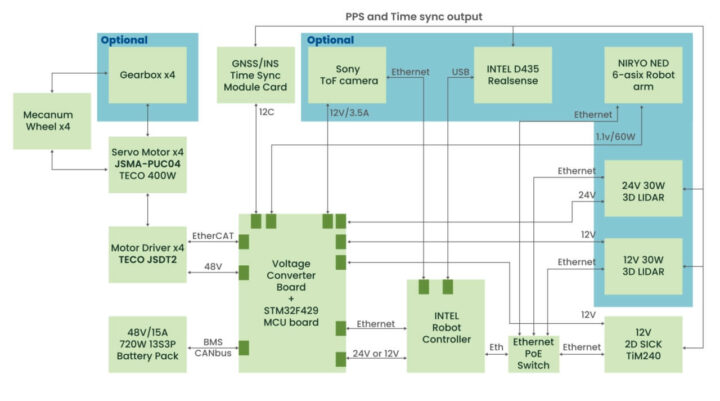
该机器人配备了四个 400W TECO 伺服电机,伺服电机可为传感器和机械臂提供高达 80kg 的有效负载,同时为传感器提供 12V 和 24V 电源输出。它还带有四个 USB 3.0 端口、配备了一个带有英特尔 RealSense 和 ToF 摄像头的 8 摄像头套件。
Syncbotic Syncbot 四轮自主移动机器人的规格:
- 机器人控制器平台(选择任意一个)
- SyncBotic A100 evaluation ki (Apollo Lake E3940)
- SyncBotic SBC-T800 系列(英特尔 Tiger Lake UP3)
- SyncBotic SBC W 系列(Intel Tiger Lake UP3,防水版)
- SyncBotic NSync-200 系列 (NVIDIA NX)
- 尺寸 – 200 x 190 mm
- 基于STM32的运动控制板
- 网络
- 1 个 10/100M 端口,用于 EtherCAT 主站,用于伺服电机控制
- 1 个 10/100M 端口用于其他用途
- CAN总线接口
- 1x CAN 总线用于电池 BMS(4 针 M12 A 编码)
- 1x CAN 总线用于其他用途
- DI/DO 接口 – 24V DI/DO 用于状态控制、监控
- I/O 接口 – 2x I2C, 5x PWM GPIO, 2x SPI, 2x UART on terminal block, 1x micro USB 端口
- 调试/编程 – 1x USB JTAG 接口
- 电源输出 – 集成 48V 600W 电源模块,支持 4x 稳定 48V 输出,带 15A 保险丝用于伺服电机(可升级至 1200W 功率)
- 电源输入 – 高达 48V/15A
- 网络
- 伺服电机/电机驱动器/变速箱
- 电机驱动器 – 4x TECO 电机驱动器
- 伺服电机 – 4x TECO 48V / 400W 伺服电机,3000RPM
- 可选变速箱 – 4x LIMING 变速箱,传动比:15,2 级,带输入法兰(用于管端之间的连接)
- 电机 DI/DO – 6x 24V DI、4x 24V DO、1x DICOM、1x DOCOM
- 主机接口 – 4x USB、EtherCAT IN/OUT
- 电源输入 – 48V DC,8A 持续,11A 用于浪涌电流(开机瞬间的峰值电流)
- 机器人传感器
- 2D 激光雷达 – 正面1x SICK TiM240 SLAM 激光雷达
- 可选 3D LiDAR – 1x Voledyne VLP-16 或 Ouster OS0-32 3D LiDAR
- 可选 SyncBotic TSMC 卡 – 1x TSMC 卡,带 9 轴 IMU + L1 GPS
- 可选摄像头
- 英特尔实感 D435i、D405
- oToBrite ToF 摄像头,oToCAM500
- 可选机械臂 – NIRYO Ned教育机械臂
- 最大有效负载 – 80 kg
- 速度 – 0.6m/s 至 1m/s(2.1 至 3.6km/h)
- 输入/输出
- 3 个带 M12 连接器的千兆以太网
- 4 个 USB 3.0 Gen1 Type-A 连接器
- 其他
- 带 LED 的电源按钮
- 紧急按钮
- 用于提示机器人控制器和伺服电机准备就绪的蓝色 LED
- 伺服电机报警红色 LED
- 电池
- 标称电压:48V DC;范围:39V 至 54.6V,13S3P LG21700 锂离子电池
- 电源输入/输出连接器 – Anderson XT60
BMS 端口 1x CANbus,带 M12 A 编码,4 针
- 功率输出
- 2x 11.1V / 6A 带圆形连接器
- 1x 12V / 2A 带圆形连接器
- x 24V / 2A 带圆形连接器
- 所有电源输出支持OVP、OCP、短路保护
- 机器人尺寸和重量
- 车轮 – 4 个5 英寸麦克纳姆车轮
- AMR 长度 – 600 mm
- AMR 宽度 – 400 mm
- AMR 高度 – 200 mm
AMR 间隙 – 20 mm - 重量 – 20 kg
以上就是我目前掌握有关 SyncBot 机器人的所有信息,如果你们感兴趣可以在该公司的网站上找到更多详细信息。我其实是在查看 AAEON RBX-I2000 机器人控制器的公告时,才看到了 SyncBot 这个教育机器人的。Syncbotic 方面将 SyncBot 列为 SBC-T800 系列销售。该新控制器搭载的是 Intel Tiger Lake UP3 Core i7/i5/i3 赛扬处理器,具有基于硬件的时间同步功能,可改善两个连接器上的传感器融合,通过软件将延迟从 100 微秒到200 微秒降至仅 20 纳秒。
AAEON RBX-I2000 机器人控制器还自带 4 路同步接口,每个通道都可以支持9600bps和115200bps两种波特率。而且它结合了内置的 Xsens MTi-670 9 轴IMU 和 Movella Xsens RTK,甚至可以实现厘米级定位数据。AAEON RBX-I2000 默认运行的系统是 Windows 10 IoT Enterprise,但如果用户有需要可根据要求提供 Linux。更多详情可在其产品页面上找到。
除了应用在教育和研究领域的 SyncBot 自主移动机器人之外,AAEON 方面其实还希望自己的 RBX-I2000 能够进入智能农业和采矿应用。不过,它们的 SyncBot 机器人和相关控制器的价格目前都还没有对外公开。但控制器的售价应该会超过一千美元。另外,考虑到 SyncBot 上的 NIRYO Ned 机械臂就大约需要 2,900 欧元,所以一个完整的机器人售价应该会超过 10,000 美元。

文章翻译者:Jacob,嵌入式系统测试工程师、RAK高级工程师,物联网行业多年工作经验,熟悉嵌入式开发、测试各个环节,对不同产品有自己专业的分析与评估。